-

北京慧摩森电子系统技术有限公司
主营:线性伺服驱动器,光栅编码器,直驱电机,直线电机平台转台 - 13903348643

北京慧摩森电子系统技术有限公司
主营:线性伺服驱动器,光栅编码器,直驱电机,直线电机平台转台 3
3
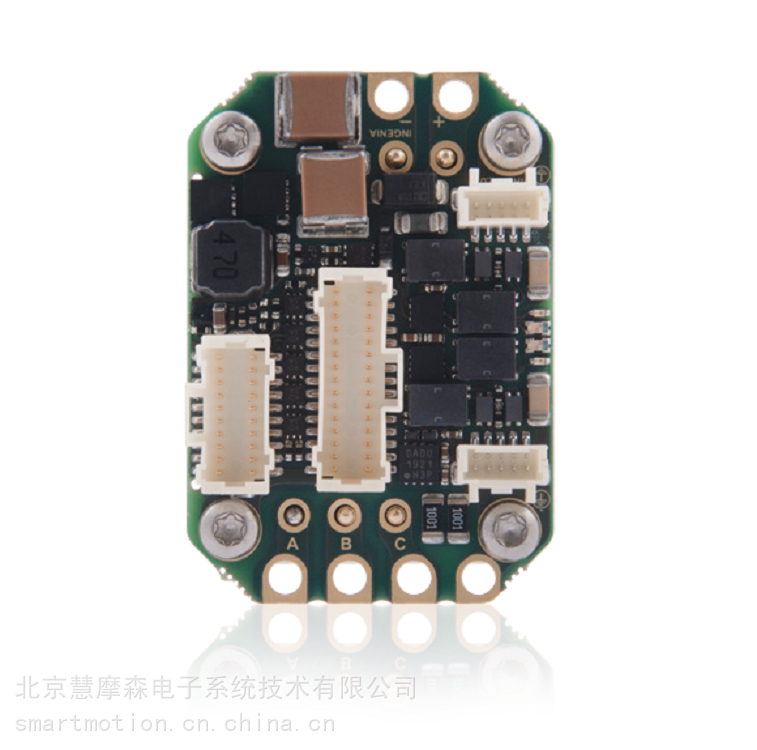

Capitan系列伺服驱动器具有**紧凑、高功率密度和高效的特点。轻薄的设计,便于集成在紧凑型机器人关节、平面致动器、末端执行器、手术机器人、外骨骼、万向节和触觉应用中。采用很好的晶体管设计,体验很高的功率密度和效率。通信延迟已进行优化,以很大限度地提高系统响应能力。降低了待机功耗,以很大限度地减少热量产生,并且固件架构设计为可适应高达200kHz的PWM频率,很大限度地利用总线电压,实现低电感电机控制。通信选项包括EtherCAT,CANopen和SPI。

特点:
小巧轻便
**扁平设计
低待机功耗
低电感电机的PWM频率高达200 kHz
很快的伺服环路,实现平稳运行
很小通信延迟
双环支持,实现很高的精度
提供EtherCAT/CANopen版本
SPI通信接口,用于优化多轴体系结构
效率可达99%
功能安全STO SIL3 Ple

CAP-XCR-E
CAP-XCR-C
CAP-NET-E
CAP-NET-C
CAP-COR-S